Prof. Dr. Bogdan Pavković

Dr. Pavkovic is the NIT Institute CTO, Safety, in charge of Quality, and Security consultancy. Associate Professor at the Faculty of Technical Sciences - University of Novi Sad, and Functional Safety Instructor at the University of California San Diego.
Previously he served as the Technical Group Lead and Software Architect at the TTTech Automotive for 7 years;
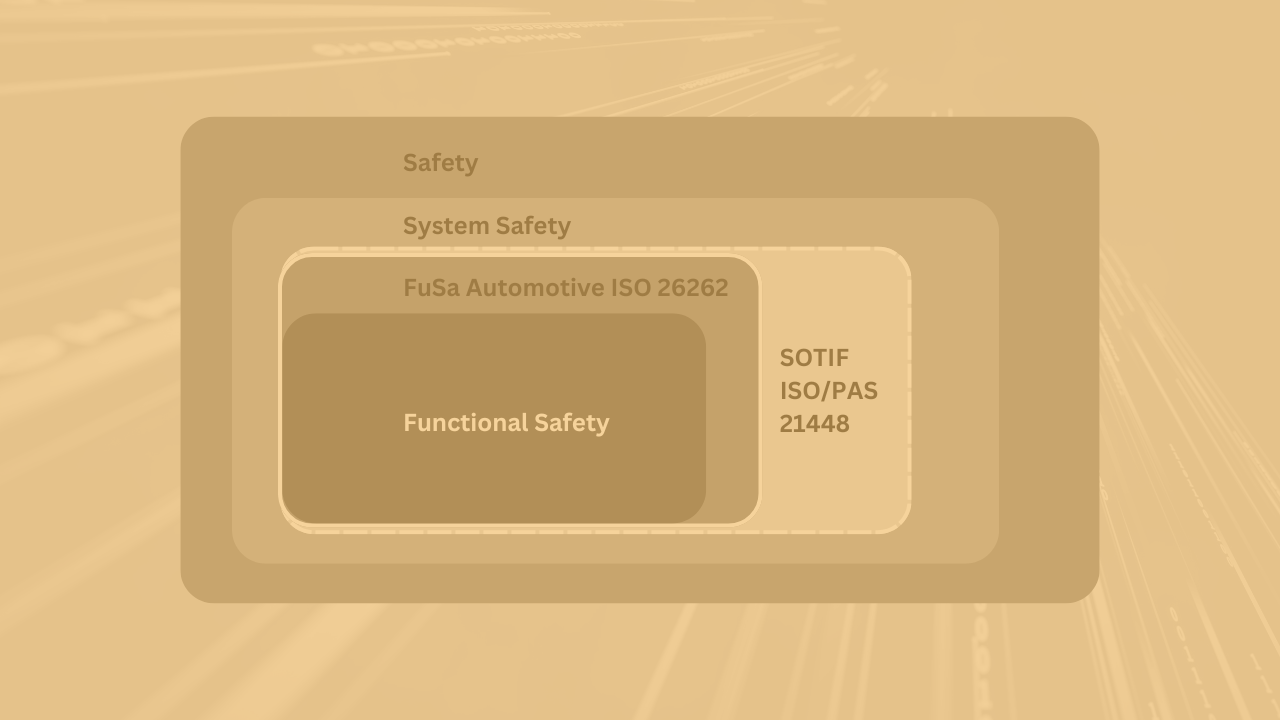
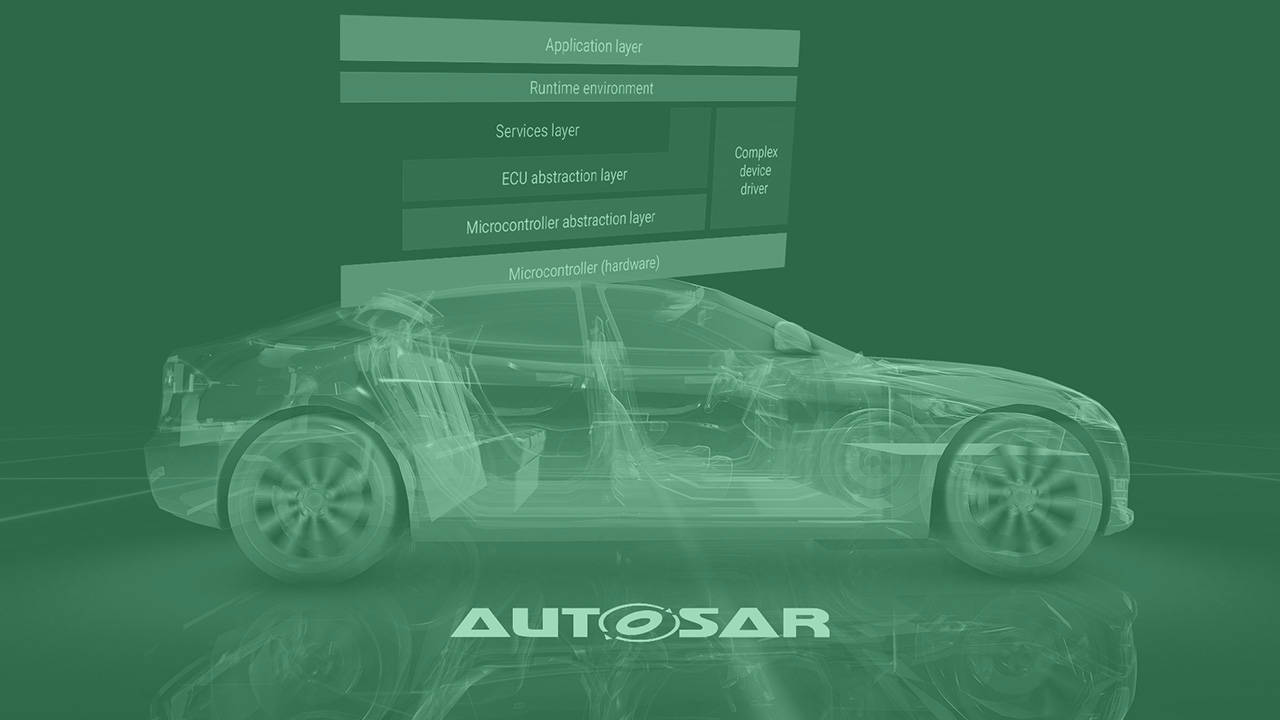
He focuses on automotive time-triggered deterministic communication, AUTOSAR layered automotive software stack, and application of ISO26262 in real automotive projects for the industry-leading research and development activities across several design centers in Europe.
He is in charge of around 30 people working on cutting-edge computer vision and machine learning optimizations for embedded automotive platforms for top-tier OEMs from both camera and lidar domains, with regard to their appropriate design and utilization with regard to safety. He has extensive professional experience in planning, executing, leading, supporting, and analyzing research projects and technologies in computer engineering, communication technologies, and automotive software.
Dr. Pavkovic holds a Ph.D. in Computer Science on cross-stack quality of service assurance in wireless sensor networks for Smart Homes and Cities from the Grenoble Institute of Technology (France). Furthermore, he holds the Academic Safety Engineer degree from the FH CampusWien - Vienna Institute for Safety and Systems Engineering (Austria).
At the Faculty of Technical Sciences, Novi Sad, he teaches automotive courses on modern vehicle communication and functionally safe software stacks. He authored over 30 publications, holds several patents, and has given over several dozens of talks at international conferences and workshops.
References
- Bogdan Pavković, Fabrice Theoleyre, “MAC and Routing Integration in Wireless Sensor Networks in Using Cross-Layer Techniques”, Communication Systems: Techniques and Applications by IGI Global, http://doi.org/10.4018/978-1-4666-0960-0.ch011
- Bogdan Pavkovic, Andrzej Duda, Won-Joo Hwang, Fabrice Theoleyre, “Efficient Topology Construction for RPL over IEEE 802.15.4 in Wireless Sensor Networks”, Elsevier Ad Hoc Networks Journal, https://doi.org/10.1016/j.adhoc.2013.08.009
- Miladin Sandić, Bogdan Pavković, Nikola Teslić, “TTEthernet Mixed-Critical Communication: Overview and Impact of Faulty-Switches”, IEEE Consumer Electronics Magazine, https://doi.org/10.1109/MCE.2020.2978224
- Bogdan Pavković, Miladin Sandić, Nikola Teslić, “A genetic simulation strategy: Application to single-fault analysis of TTEthernet synchronization protocol”, Elsevier Journal of Systems Architecture, https://doi.org/10.1016/j.sysarc.2021.102169
- Ivan Mezei, Milan Lukic, Lazar Berbakov, Bogdan Pavkovic, and Boris Radovanovic, “Grapevine Downy Mildew Warning System Based on NB-IoT and Energy Harvesting Technology”, Elsevier Journal of Systems Architecture, https://doi.org/10.3390/electronics11030356
Courses



Create your first functional safety concept and technical safety concept for a modern car.
The goal of the course is to give you helpful directions on how to design safety functions within safety-related systems in modern vehicles, with regard to system design and best practices. Central concepts are exercised to prevent and tolerate faults in the system domain and prepare a foundation for hardware and software domains. The focus is on understanding the applicability and limits of methods (formal and non-formal), with an emphasis on functional safety. Examples will be used to explain how specific techniques can be applied and implemented in order to fulfill safety requirements in practical vehicle subsystems. Finally, you will examine how the formal model-checking principles can be applied in order to guarantee the soundness and correctness of the technical safety concept and to avoid any safety pitfalls.
Course topics:
- Technical System Design
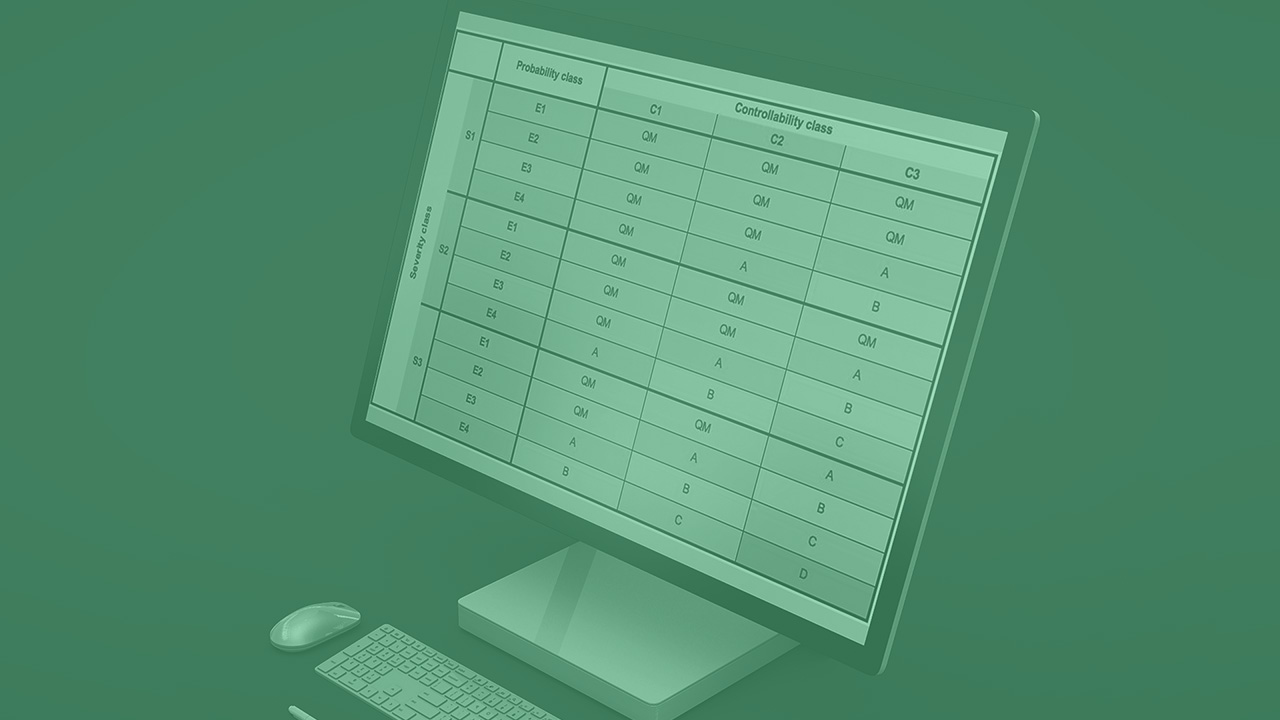
- Safety Analysis and avoidance of Systematic Failures
- Basics of Formal Methods
- Model Checking
- Basics of the model-driven system and software development using SysML and UML diagrams
- Applications of safety analysis in the models
Requirements
Hardware: Computer with Internet connection, working speakers, and microphone.
Software: Chrome browser.
Prior knowledge: Students should have basic knowledge of system safety, functional safety, and its application to automotive engineering in the scope of ISO 26262. At the very least, courses “NIT-FSBA-01: Systems, Functions and Safety” and “NIT-FSBA-05: Functional Safety Standards in Automotive” should have been completed beforehand.